Projekt Mechatroniczny
ROBOT SCARA
Kompletny, 4-osiowy system mechatroniczny zaprojektowany i zbudowany od podstaw, z autorskim oprogramowaniem i zdalnym interfejsem HMI, stworzony w celu pełnego zrozumienia i kontroli nad każdym aspektem jego działania.
Poznaj ProjektFilozofia Projektu
U podstaw tego projektu leży filozofia pełnej kontroli i głębokiego zrozumienia. Zamiast składać gotowe komponenty, każdy element – od mechaniki, przez elektronikę, po oprogramowanie – został zaprojektowany i wykonany przez nas. Pozwoliło to na dogłębne poznanie technologii i stworzenie urządzenia w pełni zintegrowanego i zoptymalizowanego.
Specyfikacja Techniczna
| Kinematyka | 4-osiowa SCARA (Selective Compliance Assembly Robot Arm) |
|---|---|
| Przestrzeń robocza | Zasięg: ~600 mm |
| Udźwig maksymalny | 6 kg |
| Napęd | Silniki krokowe NEMA z przekładniami pasowymi (rdzeń stalowy/włókno szklane) |
| Sterownik główny | System sterowania: Raspberry Pi 4 (Backend) + ESP32 (Firmware) |
| Oprogramowanie sterujące | Autorski system sterowania (Python/Flask, C++) oraz webowy panel HMI |
Architektura Systemu
System został zaprojektowany w sprawdzonej, modułowej architekturze trójwarstwowej, która oddziela interfejs użytkownika, logikę aplikacji i sterowanie w czasie rzeczywistym. Komunikacja między warstwą logiki (Backend na Raspberry Pi) a warstwą wykonawczą (Firmware na ESP32) odbywa się przez port szeregowy. Backend pełni rolę serwera webowego dla interfejsu HMI, umożliwiając zdalne sterowanie i monitoring robota z dowolnego urządzenia w sieci lokalnej.
Warstwa Prezentacji
Interfejs HMI dostępny przez przeglądarkę na dowolnym urządzeniu.
HTML / CSS / JSWarstwa Logiki
Serwer webowy, przetwarzanie G-code i planowanie ruchu.
Raspberry Pi 4 / PythonWarstwa Wykonawcza
Sterowanie silnikami krokowymi i obsługa czujników w czasie rzeczywistym.
ESP32 / C++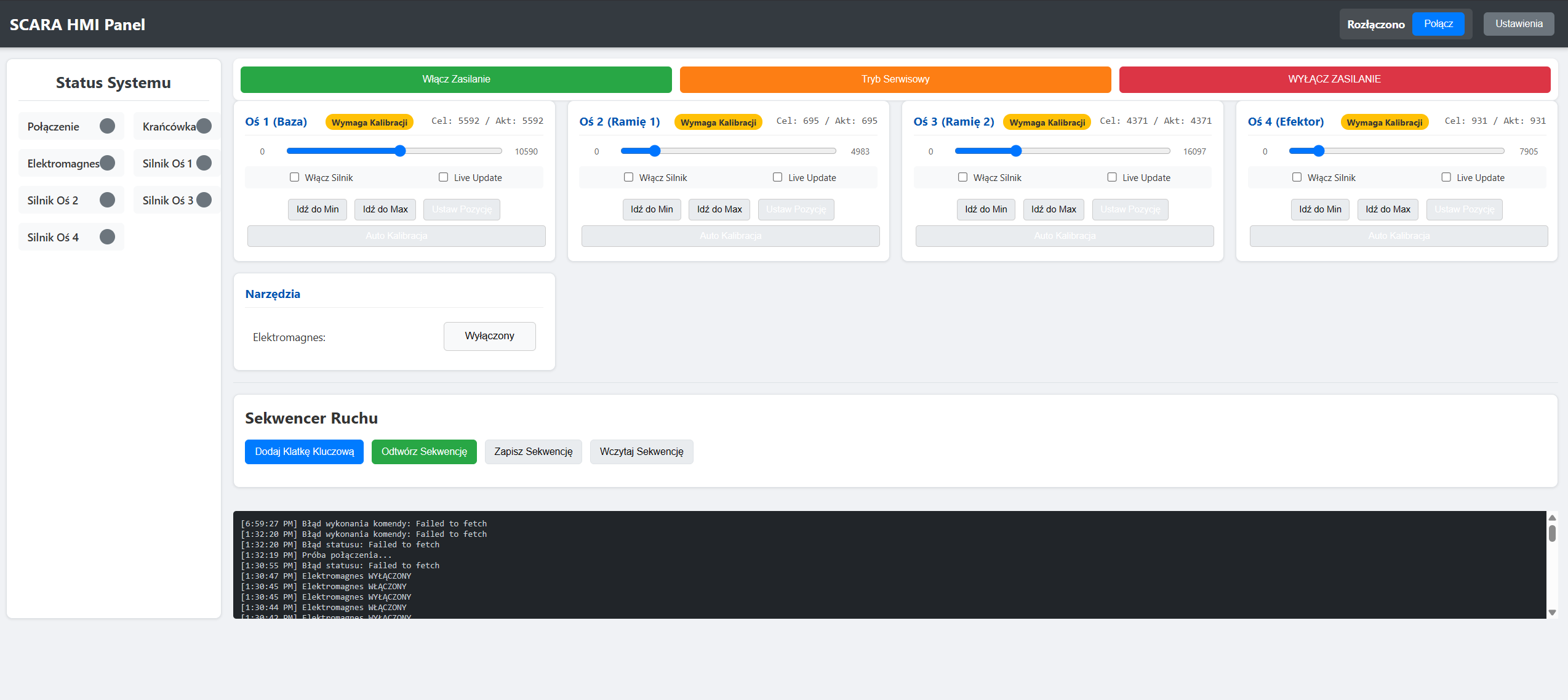
Proces Projektowy
Projekt realizowano iteracyjnie, przechodząc przez kluczowe etapy rozwoju produktu inżynierskiego.
Koncepcja i Badania
Analiza istniejących rozwiązań, zdefiniowanie wymagań projektowych i wybór kluczowych technologii.
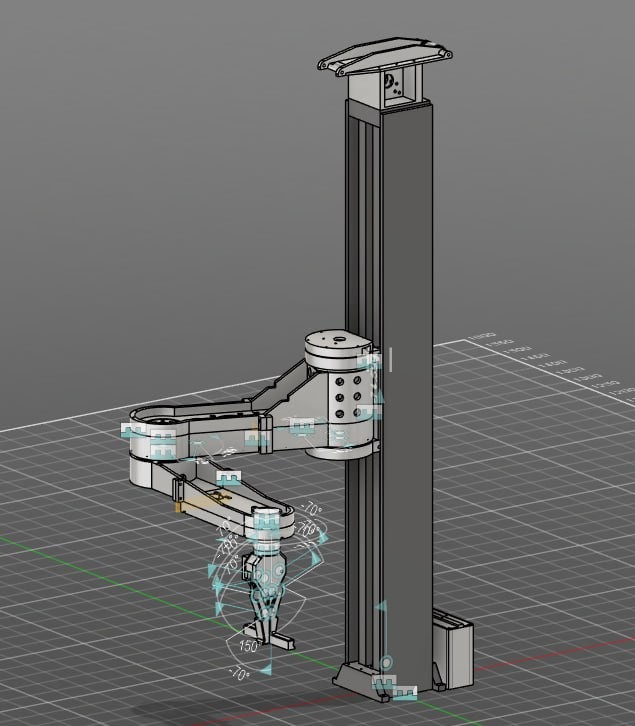
Projektowanie CAD
Modelowanie 3D wszystkich komponentów mechanicznych w środowiskach CAD (Fusion 360, Solid Edge), symulacje ruchu i przygotowanie do produkcji.
Prototypowanie i Montaż
Wydruk 3D części (FDM, SLA), montaż mechaniki, budowa szafy sterowniczej i integracja komponentów elektronicznych.
Programowanie i Testy
Implementacja firmware'u, rozwój panelu HMI, testowanie poszczególnych modułów i finalna integracja oprogramowania ze sprzętem.
Inżynieria i Technologie
Inżynieria Mechaniczna
Konstrukcja robota została zoptymalizowana pod kątem sztywności i niskiej masy. Zastosowano iteracyjny proces projektowy oparty na 3 prototypach, co pozwoliło na eliminację luzów i dobór zaawansowanych materiałów. Precyzję transmisji napędu osiągnięto dzięki kołom zębatym drukowanym w technologii SLA oraz wzmacnianym paskom zębatym.
- Fusion 360
- Solid Edge
- Druk 3D (FDM, SLA)
- Kompozyty drukowane
System Sterowania i Elektronika
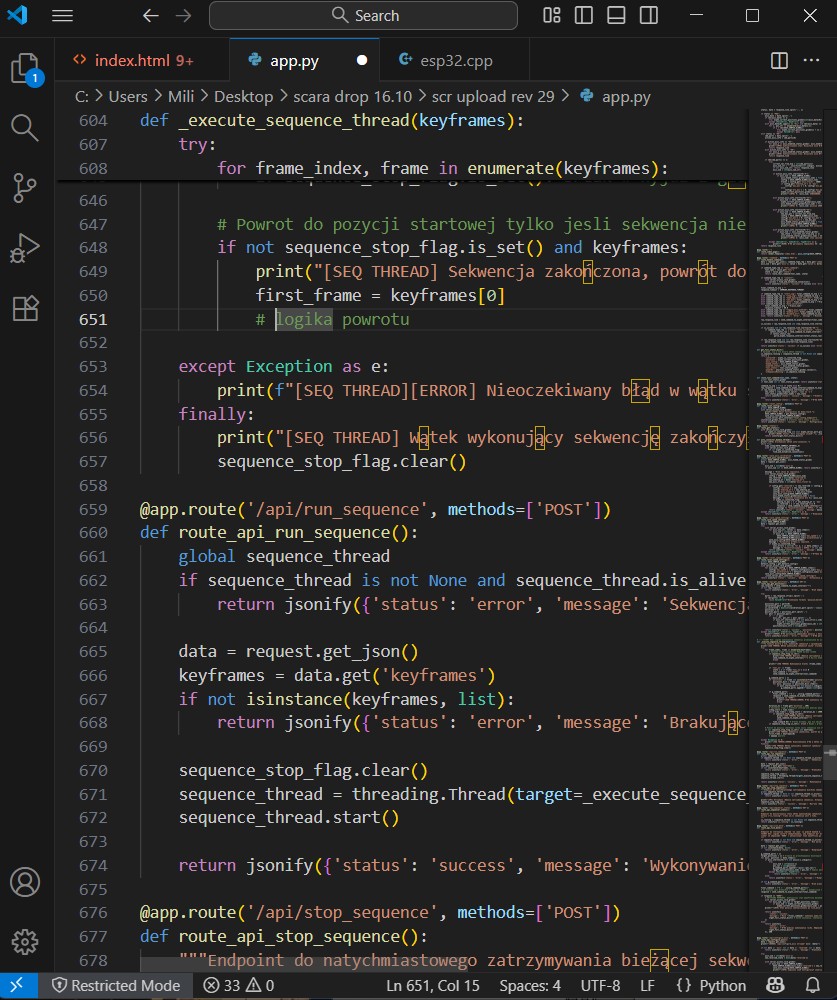
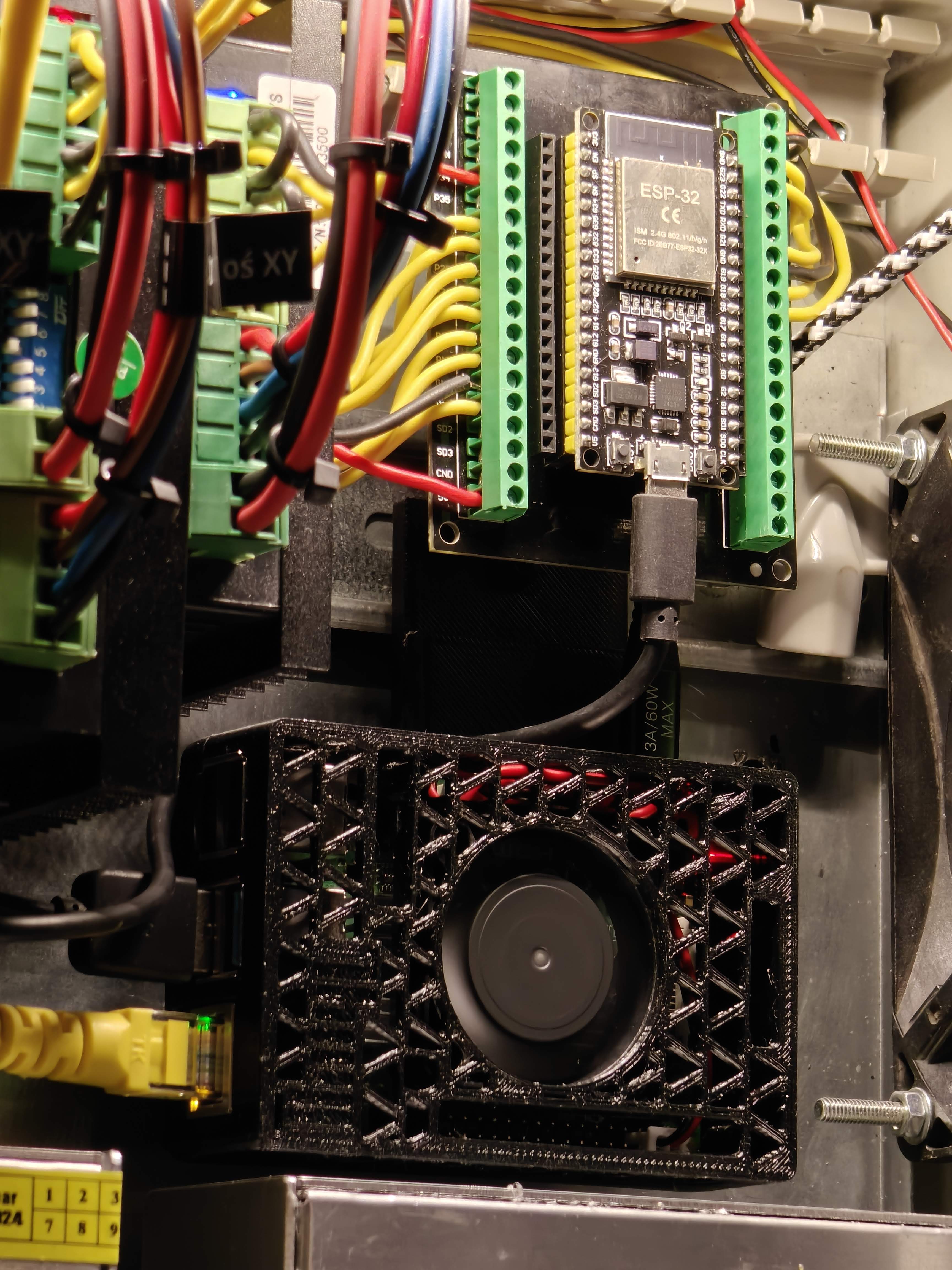
Sercem systemu jest dedykowana szafa sterownicza, integrująca logikę opartą na Raspberry Pi, sterowniki silników zasilane napięciem 48V oraz dwupoziomowe systemy bezpieczeństwa (E-STOP). Firmware na mikrokontrolerze ESP32 odpowiada za wykonywanie poleceń i precyzyjne sterowanie ruchem z wykorzystaniem mikrokroku.
- PlatformIO + VS Code
- Python (Flask)
- C++
- Raspberry Pi
- ESP32
O Zespole
Projekt został zrealizowany przez trzyosobowy zespół. Połączenie umiejętności z zakresu mechaniki, elektroniki i oprogramowania pozwoliło na kompleksową realizację zadania – od modelu 3D po działający system sterowania.
Tymon Jasiulek
Odpowiedzialny za projekt w środowisku CAD i iteracyjny rozwój całej konstrukcji mechanicznej ramienia robota, dbając o jego sztywność, dynamikę i precyzję ruchu.
Jakub Szewczyk
Odpowiedzialny za projekt i wykonanie efektora końcowego (chwytaka), montaż oraz okablowanie szafy sterowniczej i ramienia robota.
Miłosz Grudziłowicz
Odpowiedzialny za architekturę oprogramowania, dobór komponentów elektronicznych, projekt i integrację szafy sterowniczej.
Dziennik Projektowy: Od Pomysłu do Ruchu
Wyzwanie – Precyzja Transmisji Napędu
Problem: Wczesne prototypy cierpiały na problemy z precyzją ruchu spowodowane przeskakiwaniem standardowych pasków zębatych.
Rozwiązanie: Po analizie, całkowicie przeprojektowaliśmy przeniesienie napędu. Zastosowaliśmy koła zębate drukowane w wysokorozdzielczej technologii SLA oraz wzmacniane paski zębate z rdzeniem stalowym i z włókna szklanego. To posunięcie radykalnie zwiększyło precyzję i wyeliminowało problem gubienia kroków.
Wyzwanie – Stabilność Architektury Oprogramowania
Problem: Jak zapewnić spójność danych i niezawodną komunikację w systemie rozproszonym na trzech różnych platformach (przeglądarka, Raspberry Pi, ESP32)?
Rozwiązanie: Zdecydowaliśmy się na klasyczną, trójwarstwową architekturę, w której backend w Pythonie pełni rolę centralnego "mózgu" i jedynego źródła prawdy (Single Source of Truth). Tłumaczy on wysokopoziomowe polecenia z interfejsu HMI na proste komendy dla firmware'u, zapewniając stabilność i eliminując konflikty.
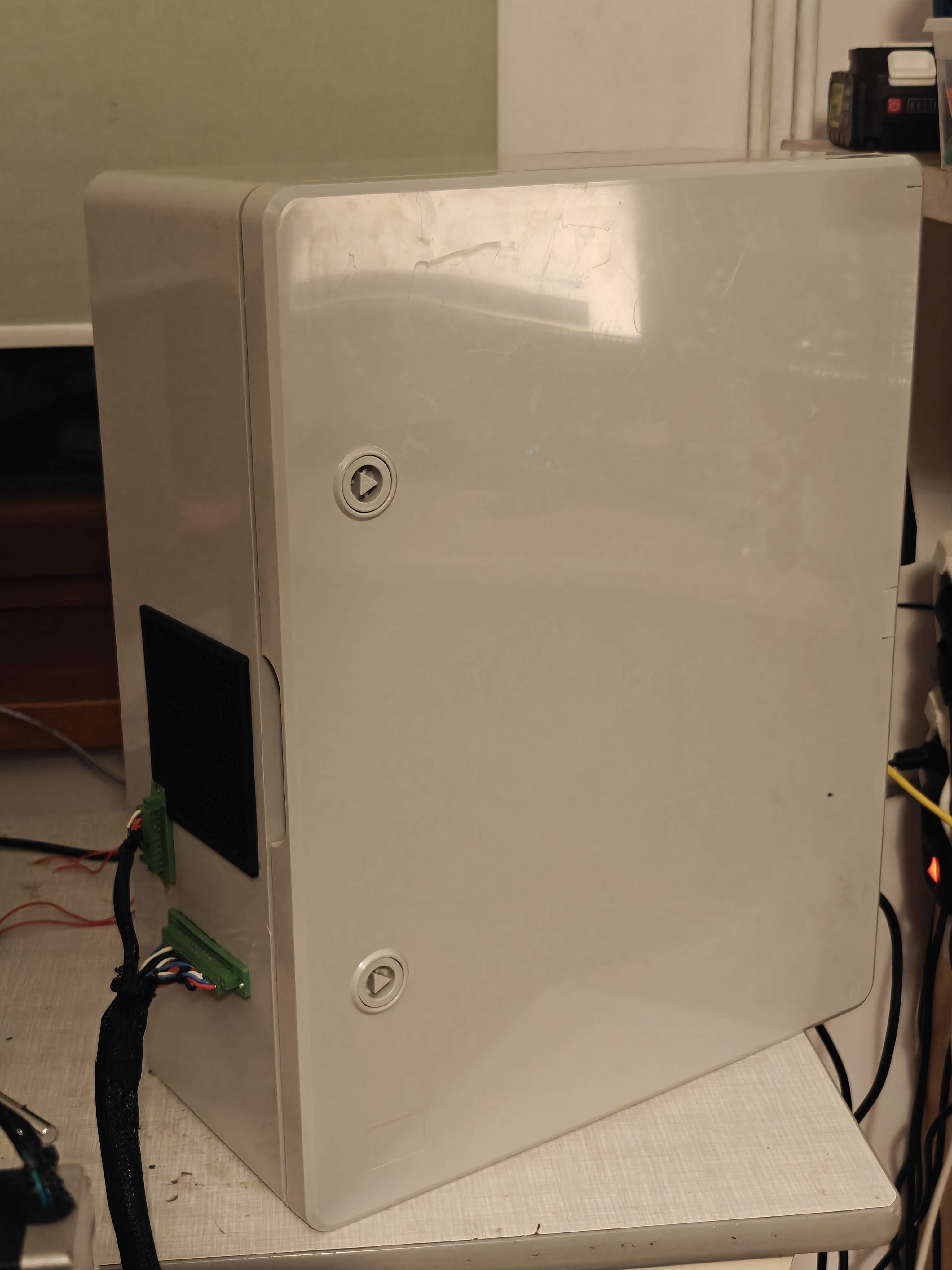
Wyzwanie – Profesjonalny Montaż Elektroniki
Problem: Jak zintegrować kilkanaście różnych modułów elektronicznych w sposób bezpieczny, niezawodny i łatwy w serwisowaniu?
Rozwiązanie: Zamiast prowizorycznego montażu, zbudowaliśmy dedykowaną szafę sterowniczą. Zaprojektowaliśmy i wydrukowaliśmy niestandardowe uchwyty na szynę DIN, co pozwoliło na czysty, modułowy i zgodny ze standardami przemysłowymi montaż wszystkich komponentów.
Galeria Projektu


Plany Rozwoju i Przyszłe Możliwości
Projekt jest podstawą do dalszych iteracji. Poniżej przedstawiamy kluczowe kierunki, w których planujemy rozwijać platformę.
Kinematyka Odwrotna (IK)
Priorytetem jest implementacja algorytmów kinematyki odwrotnej. Pozwoli to na sterowanie robotem w intuicyjnej przestrzeni kartezjańskiej (X, Y, Z), a nie w przestrzeni stawowej (kąty obrotu silników). Umożliwi to programowanie złożonych trajektorii ruchu, takich jak rysowanie, grawerowanie czy śledzenie zdefiniowanych ścieżek.
Integracja z Systemami Wizyjnymi
Kolejnym krokiem będzie montaż kamery i integracja z biblioteką OpenCV. Celem jest stworzenie systemu "pick and place", w którym robot będzie w stanie samodzielnie lokalizować, identyfikować i przenosić obiekty znajdujące się w jego przestrzeni roboczej.
Automatyczny Magazyn Narzędzi
Długofalowym celem jest rozbudowa konstrukcji o system pozwalający na autonomiczną wymianę efektorów końcowych. Umożliwiłoby to robotowi automatyczne przełączanie się między różnymi narzędziami (np. chwytakiem, wiertarką, dyszą do druku 3D), co znacząco zwiększyłoby jego wszechstronność.
Rozbudowa API i Integracja z ROS
Planowane jest rozszerzenie API serwera, aby umożliwić integrację robota z nadrzędnymi systemami sterowania, takimi jak ROS (Robot Operating System). Uczyniłoby to z naszego projektu platformę zgodną ze standardami przemysłowymi i akademickimi.
Dokumentacja na GitHub
Planowane jest udostępnienie całego projektu, włączając kod źródłowy, modele CAD i schematy, jako open-source. Pozwoli to na transparentność, ułatwi współpracę i umożliwi innym czerpanie z naszych doświadczeń.
Plakat Naukowy
Odkryj kompletne podsumowanie naszego projektu. Znajdziesz tam szczegóły konstrukcyjne, założenia oraz wyniki prac zaprezentowane w akademickiej formie.
Otwórz plakat (PDF)